PI: M. Golparvar-Fard/ Student: A. Ibrahim
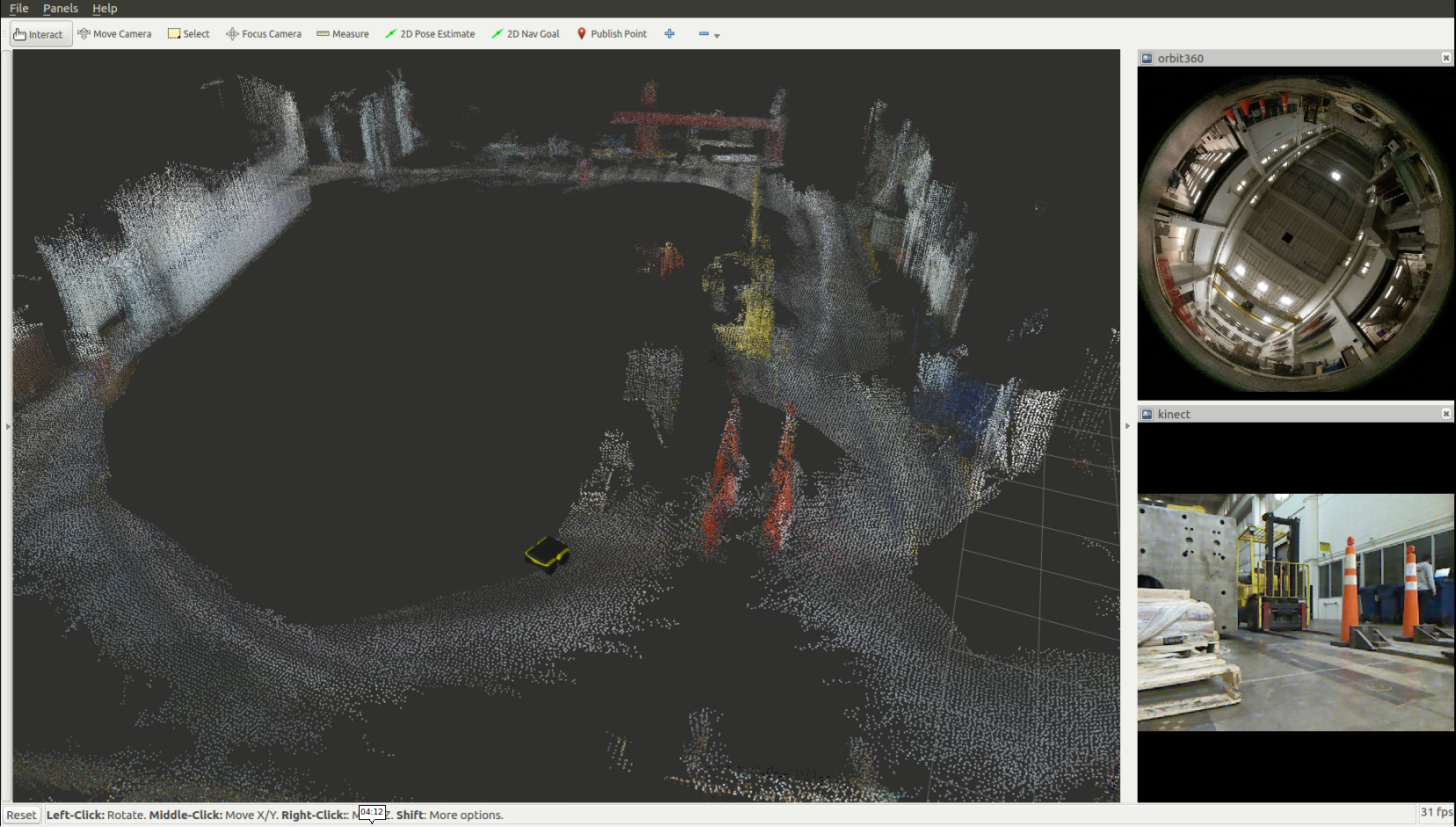
This research explores new path planning and navigation methods for autonomous robotic platforms that support reality capture on construction sites. New methods and metrics are developed that guarantee accuracy and completeness of reality mapping for construction progress and quality monitoring applications. Lab testing is used to validate the performance of these methods and metrics against simulated values.
For more information, please contact Amir Ibrahim (aaelsay2@illinois.edu) or Prof. Mani Golparvar-Fard (mgolpar@illinois.edu).




No responses yet